18 简单物联网
最后更新于:2022-04-01 02:50:23
# 简单物联网
到这时,我们算搭建了一个简单的REST服务了。接着我们可以简单的做一个最小的物联网系统,将我们的单片机、MCU等等连上网。
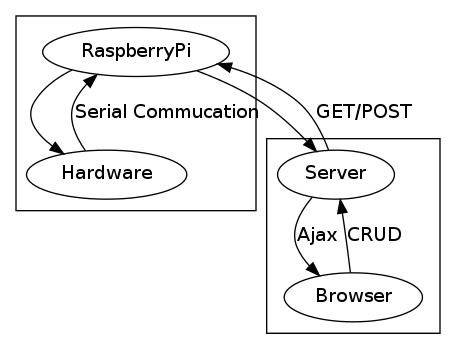
考虑到如果我们只是单一连接各个节点,那么系统的结构图,同下所示
下面的星形结构图类似于我们在接下来所要构建的系统
一个用于控制真实电器的硬件实物图

## 硬件通信
### 串口通信
Arduino与Raspberry Pi通过串口通信的方式实现通信,相互传输所需要的数据,Raspberry Pi将资源传于互联网上对应的接口,接口可以在互联网上被访问。Laravel框架构架于服务器之上,将Raspbery Pi获取过来的数据存储于MySQL数据,再以REST服务的方式共享数据,互联网上的其他设备便可以通过网络来访问这些设备。Ajax用于将后台的数据以不需要刷新的方式传递到网站前台,通过HighCharts框架显示给终端用户。
#### Python
1.在Windows中的串口通常是`COM1`,`COM0`等等
~~~
ser=serial.Serial("COM0",9600)
~~~
2.Mac OS系统中位于/dev目录下,名字类似于`tty.usbmodem1451`。
~~~
serial.Serial("/dev/tty.usbmodem1451",9600)
~~~
3.在Linux内核的系统中虚拟串口用的节点是ttyACM,位于/dev目录下。
~~~
serial.Serial("/dev/ttyACM0",9600)
~~~
> 串行接口是一种可以将接受来自CPU的并行数据字符转换为连续的串行数据流发送出去,同时可将接受的串行数据流转换为并行的数据字符供给CPU的器件。一般完成这种功能 的电路,我们称为串行接口电路。
便是打开这个设备,以9600的速率传输数据。
~~~
import json
import urllib2
import serial
import time
url="http://www.xianuniversity.com/athome/1"
while 1:
try:
date=urllib2.urlopen(url)
result=json.load(date)
status=result[0]["led1"]
ser=serial.Serial("/dev/ttyACM0",9600)
if status==1 :
ser.write("1")
elif status==0:
ser.write("0")
time.sleep(1)
except urllib2.URLError:
print "Bad URL or timeout"
~~~
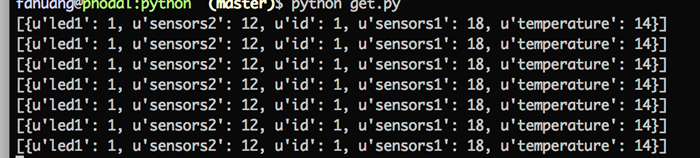
系统还需要对上面的数据进行处理,只拿其中的结果
当改变led的状态后,便可以得到下面的结果
#### Ruby
如果你用的是Ruby的话,可以尝试使用`serialport`
安装
~~~
sudo gem install serialport
~~~
代码大致如下
~~~
require 'serialport'
sp = SerialPort.new "/dev/ACM0", 9600
sp.write "1"
~~~
注意: 根据相关的系统修改相关的代码。
### 18.1.2 I2C通信
## 18.2 硬件
### 18.2.1 51单片机
> 51单片机是对所有兼容Intel 8031指令系统的单片机的统称。该系列单片机的始祖是Intel的8031单片机,后来随着Flash rom技术的发展,8031单片机取得了长足的进展,成为应用最广泛的8位单片机之一,其代表型号是ATMEL公司的AT89系列,它广泛应用于工业测控系统之中。
这里以51单片机为例的原因是,多数大学课程都是以51单片机为主。
### 18.2.2 Arduino
### 18.2.3 Raspberry Pi
对于搭载GNU/Linux系统的RPi来说,这活就比较轻松了。
### 18.2.4 ARM
> LwIP是Light Weight (轻型)IP协议,有无操作系统的支持都可以运行。LwIP实现的重点是在保持TCP协议主要功能的基础上减少对RAM 的占用,它只需十几KB的RAM和40K左右的ROM就可以运行,这使LwIP协议栈适合在低端的嵌入式系统中使用。
~~~
git clone git@gitorious.org:coap-lwip/coap-lwip.git
~~~
[TinyOS CoAP](http://tinyos.stanford.edu/tinyos-wiki/index.php/CoAP)
### 18.2.5 继电器
> 继电器(英文名称:relay)是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器。它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。通常应用于自动化的控制电路中,它实际上是用小电流去控制大电流运作的一种“自动开关”。故在电路中起着自动调节、安全保护、转换电路等作用。
## 18.3 协议间通讯
当我们有使用CoAP协议的A设备,以及HTTP协议的B设备。这时,就变成一个有意思的话题了。