OpenCV2学习笔记(十一)
最后更新于:2022-04-01 06:36:10
##特征点检测之FAST算法
在上一节中,记录了Harris算子检测图像特征点的定义和基于OpenCV的实现方法,它基于两个正交方向上的强度变化率。本节记录另一种特征点检测算子FAST(Features from Accelerated Segment Test),它依赖少数像素的比较来确定是否接受一个特征点,其检测效率要好于Harris。
与Harris算法相同,FAST特征算法需要定义什么是特征点。这次的定义基于假定特征点周围的图像强度,通过检查候选像素的周围一圈像素来决定是否接受这一个特征点。与中心点差异较大的像素如果组成连续的圆弧,并且弧长大于圆周长的3/4,则可判断为特征点。
在此基础上,算法还使用了额外的技巧进行加速。首先测试一个圆圈上被90度分隔的四个点(如顶部、底部,左侧和右侧四个点),如果要满足FAST的定义条件,四个点中至少要有三个点必须同时大于或小于中心像素。如果条件不成立,则该点可以直接被移除而不需要进一步的验证。在实践中,大部分的像素点可以通过这个测试进行移除,因此该算法非常高效。
和Harris方法相同的是,可以在找到的角点上执行非极大值抑制,因此需要指定角点强度的测量方法。
这里可以使用OpenCV 2的通用接口来创建任意的特征检测器,比如FAST检测器的使用方法如下:
~~~
// 创建特征点的向量
std::vector<cv::KeyPoint>keypoints;
// 构造FAST特征检测器
cv::FastFeatureDetector fast(75);
// 进行检测
fast.detect(image, keypoints);
~~~
同时,为了方便标记特征点,OpenCV提供了通用的特征点绘制函数cv::drawKeypoints,其调用方法如下:
~~~
// 通用的特征点绘制函数
cv::drawKeypoints(image, // 输入图像
keypoints, // 特征点向量
image, // 输出图像
cv::Scalar(255,255,255), // 特征点颜色
cv::DrawMatchesFlags::DRAW_OVER_OUTIMG); // 绘制标记
~~~
通过指定选中的绘制标记,可以看到输出图像中特征点均得到了绘制:
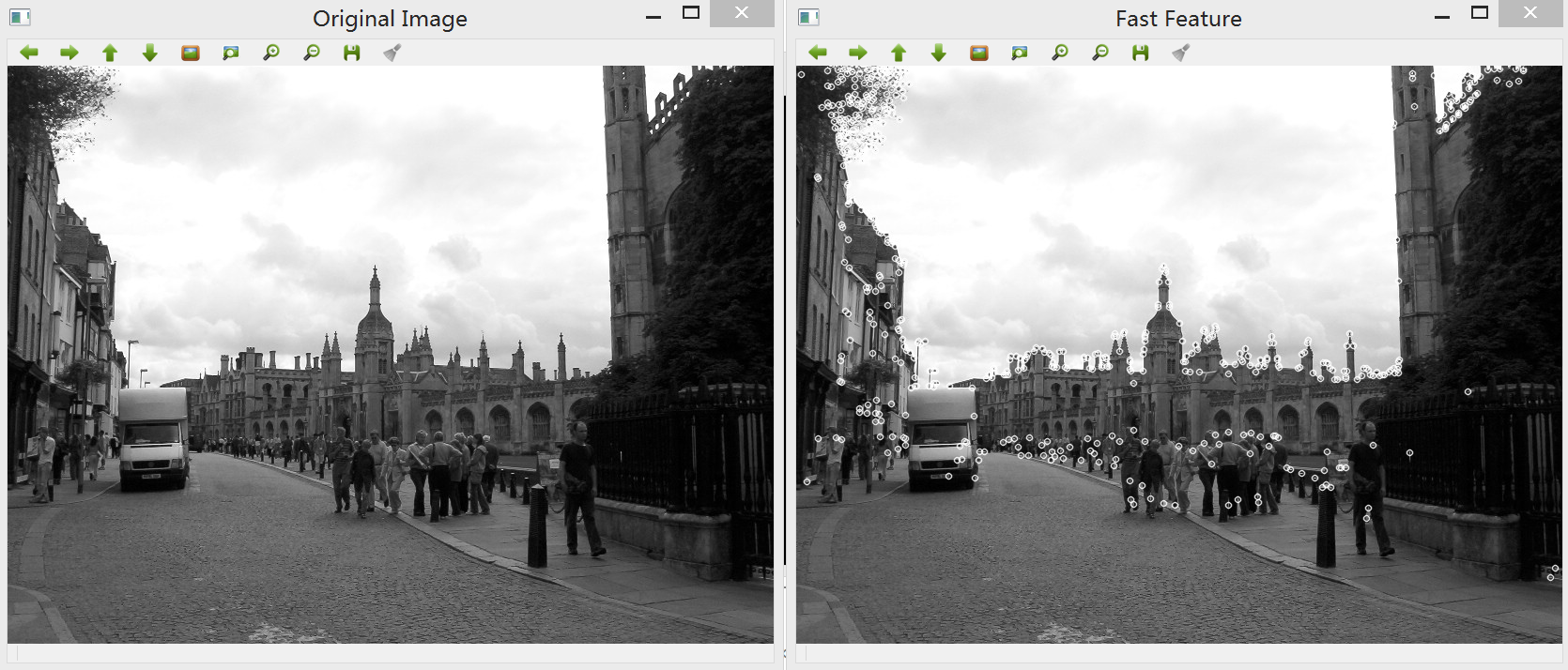
完整的实现代码如下,只需修改main函数:
~~~
#include <QCoreApplication>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
int main(int argc, char *argv[])
{
QCoreApplication a(argc, argv);
// 输入图像
cv::Mat image = cv::imread("c:/031.jpg", 0);
cv::namedWindow("Original Image");
cv::imshow("Original Image", image);
// 特征点的向量
std::vector<cv::KeyPoint>keypoints;
// 构造FAST特征检测器
cv::FastFeatureDetector fast(75);
// 进行检测
fast.detect(image, keypoints);
// 通用的特征点绘制函数
cv::drawKeypoints(image, // 输入图像
keypoints, // 特征点向量
image, // 输出图像
cv::Scalar(255, 255, 255), // 特征点颜色
cv::DrawMatchesFlags::DRAW_OVER_OUTIMG); // 绘制标记
cv::namedWindow("Fast Feature");
cv::imshow("Fast Feature", image);
return a.exec();
}
~~~
FAST算法可以获得非常快速的特征点检测,在需要考虑运行速度的时候可以选用,比如在高帧率的视频序列中进行视觉跟踪。
关于FAST特征算法的详细描述,可参考以下论文:
The article by E.Rosten, T.Drummond, Machine Learning for High-speed Corner Detection, In European Conference on Computer Vision, pp.430-443, 2006