OpenCV2学习笔记(十三)
最后更新于:2022-04-01 06:36:15
##基于SURF特征的图像匹配
SURF算法是著名的尺度不变特征检测器SIFT(Scale-Invariant Features Transform)的高效变种,它为每个检测到的特征定义了位置和尺度,其中尺度的值可用于定义围绕特征点的窗口大小,使得每个特征点都与众不同。这里便是使用SURF算法提取两幅图像中的特征点描述子,并调用OpenCV中的函数进行匹配,最后输出一个可视化的结果,开发平台为Qt5.3.2+OpenCV2.4.9。以下给出图像匹配的实现步骤:
一、输入两幅图像,使用OpenCV中的cv::FeatureDetector接口实现SURF特征检测,在实际调试中改变阈值可获得不一样的检测结果:
~~~
// 设置两个用于存放特征点的向量
std::vector<cv::KeyPoint> keypoint1;
std::vector<cv::KeyPoint> keypoint2;
// 构造SURF特征检测器
cv::SurfFeatureDetector surf(3000); // 阈值
// 对两幅图分别检测SURF特征
surf.detect(image1,keypoint1);
surf.detect(image2,keypoint2);
~~~
二、OpenCV 2.0版本中引入一个通用类,用于提取不同的特征点描述子。在这里构造一个SURF描述子提取器,输出的结果是一个矩阵,它的行数与特征点向量中的元素个数相同。每行都是一个N维描述子的向量。**在SURF算法中,默认的描述子维度为64,该向量描绘了特征点周围的强度样式。**两个特征点越相似,它们的特征向量也就越接近,因此这些描述子在图像匹配中十分有用:
~~~
cv::SurfDescriptorExtractor surfDesc;
// 对两幅图像提取SURF描述子
cv::Mat descriptor1, descriptor2;
surfDesc.compute(image1,keypoint1,descriptor1);
surfDesc.compute(image2,keypoint2,descriptor2);
~~~
提取出两幅图像各自的特征点描述子后,需要进行比较(匹配)。可以调用OpenCV中的类cv::BruteForceMatcher构造一个匹配器。cv::BruteForceMatcher是类cv::DescriptorMatcher的一个子类,定义了不同的匹配策略的共同接口,结果返回一个cv::DMatch向量,它将被用于表示一对匹配的描述子。(关于cv::BruteForceMatcher 请参考:[http://blog.csdn.net/panda1234lee/article/details/11094483?utm_source=tuicool](http://blog.csdn.net/panda1234lee/article/details/11094483?utm_source=tuicool))
三、在一批特征点匹配结果中筛选出评分(或者称距离)最理想的25个匹配结果,这通过std::nth_element实现。
~~~
void nth_element(_RandomAccessIterator _first, _RandomAccessIterator _nth, _RandomAccessIterator _last)
~~~
该函数的作用为将迭代器指向的从_first 到 _last 之间的元素进行二分排序,以_nth 为分界,前面都比 _Nth 小(大),后面都比之大(小),因此适用于找出前n个最大(最小)的元素。
四、最后一步,将匹配的结果可视化。OpenCV提供一个绘制函数以产生由两幅输入图像拼接而成的图像,而匹配的点由直线相连:
~~~
// 以下操作将匹配结果可视化
cv::Mat imageMatches;
cv::drawMatches(image1,keypoint1, // 第一张图片和检测到的特征点
image2,keypoint2, // 第二张图片和检测到的特征点
matches, // 输出的匹配结果
imageMatches, // 生成的图像
cv::Scalar(128,128,128)); // 画直线的颜色
~~~
**要注意SIFT、SURF的函数在OpenCV的nonfree模块中而不是features2d,cv::BruteForceMatcher类存放在legacy模块中**,因此函数中需要包含头文件:
~~~
#include <opencv2/legacy/legacy.hpp>
#include <opencv2/nonfree/nonfree.hpp>
~~~
完整代码如下:
~~~
#include <QCoreApplication>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/legacy/legacy.hpp>
#include <opencv2/nonfree/nonfree.hpp>
#include <QDebug>
int main(int argc, char *argv[])
{
QCoreApplication a(argc, argv);
// 以下两图比之
// 输入两张要匹配的图
cv::Mat image1= cv::imread("c:/Fig12.18(a1).jpg",0);
cv::Mat image2= cv::imread("c:/Fig12.18(a2).jpg",0);
if (!image1.data || !image2.data)
qDebug() << "Error!";
cv::namedWindow("Right Image");
cv::imshow("Right Image", image1);
cv::namedWindow("Left Image");
cv::imshow("Left Image", image2);
// 存放特征点的向量
std::vector<cv::KeyPoint> keypoint1;
std::vector<cv::KeyPoint> keypoint2;
// 构造SURF特征检测器
cv::SurfFeatureDetector surf(3000); // 阈值
// 对两幅图分别检测SURF特征
surf.detect(image1,keypoint1);
surf.detect(image2,keypoint2);
// 输出带有详细特征点信息的两幅图像
cv::Mat imageSURF;
cv::drawKeypoints(image1,keypoint1,
imageSURF,
cv::Scalar(255,255,255),
cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
cv::namedWindow("Right SURF Features");
cv::imshow("Right SURF Features", imageSURF);
cv::drawKeypoints(image2,keypoint2,
imageSURF,
cv::Scalar(255,255,255),
cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
cv::namedWindow("Left SURF Features");
cv::imshow("Left SURF Features", imageSURF);
// 构造SURF描述子提取器
cv::SurfDescriptorExtractor surfDesc;
// 对两幅图像提取SURF描述子
cv::Mat descriptor1, descriptor2;
surfDesc.compute(image1,keypoint1,descriptor1);
surfDesc.compute(image2,keypoint2,descriptor2);
// 构造匹配器
cv::BruteForceMatcher< cv::L2<float> > matcher;
// 将两张图片的描述子进行匹配,只选择25个最佳匹配
std::vector<cv::DMatch> matches;
matcher.match(descriptor1, descriptor2, matches);
std::nth_element(matches.begin(), // 初始位置
matches.begin()+24, // 排序元素的位置
matches.end()); // 终止位置
// 移除25位后的所有元素
matches.erase(matches.begin()+25, matches.end());
// 以下操作将匹配结果可视化
cv::Mat imageMatches;
cv::drawMatches(image1,keypoint1, // 第一张图片和检测到的特征点
image2,keypoint2, // 第二张图片和检测到的特征点
matches, // 输出的匹配结果
imageMatches, // 生成的图像
cv::Scalar(128,128,128)); // 画直线的颜色
cv::namedWindow("Matches"); //, CV_WINDOW_NORMAL);
cv::imshow("Matches",imageMatches);
return a.exec();
}
~~~
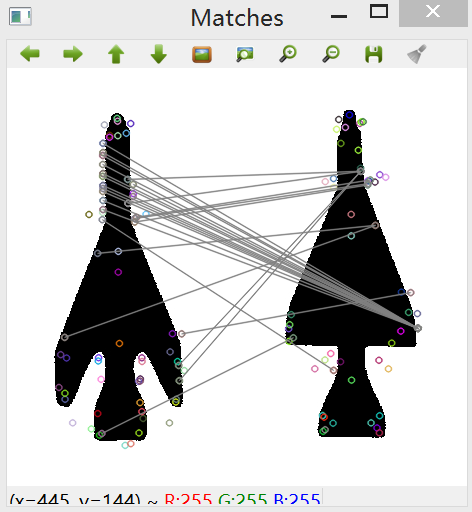
效果一,由于原图中飞机的边缘有锯齿状,因此只需观察拐角处,匹配效果良好:
效果二,不涉及图像的旋转和变形,只是将一幅图像进行缩放后进行匹配,得出的效果自然是很好:

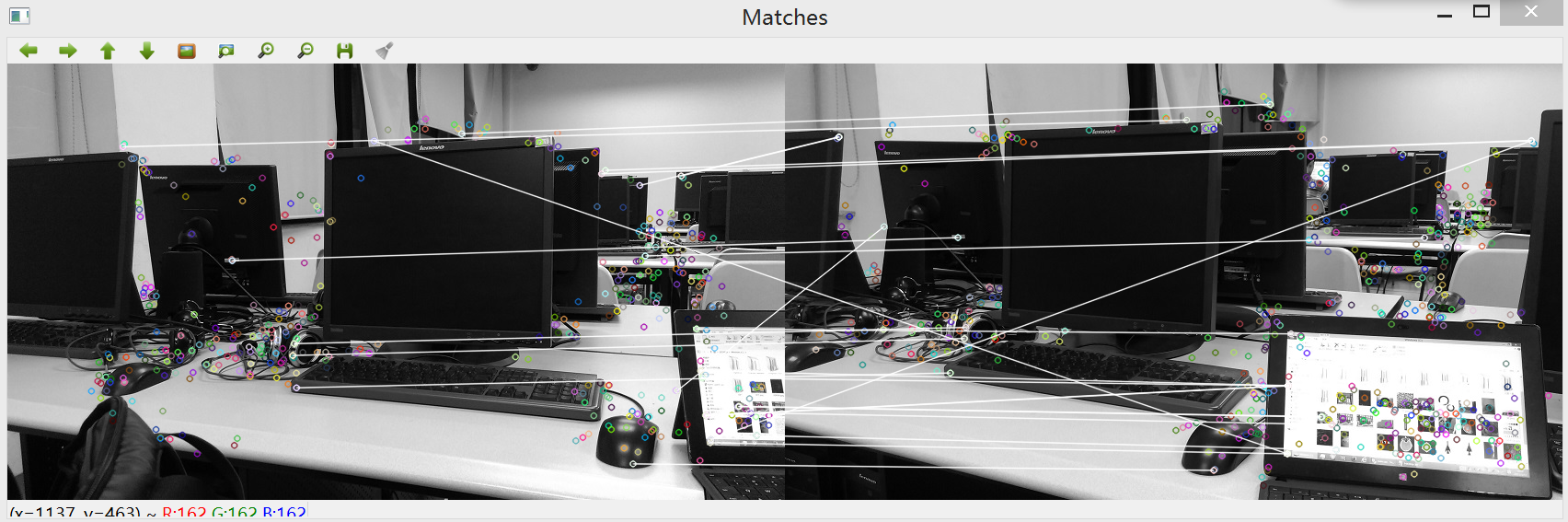
效果三,用两个不同的角度拍摄的图像进行匹配,其中部分特征点匹配有偏差,总体效果良好,在调试过程中还可以通过参数调整获取更好的匹配效果。
**附注**:另一种匹配方法是使用 cv::FlannBasedMatcher 接口以及函数 FLANN 实现快速高效匹配(快速最近邻逼近搜索函数库(Fast Approximate Nearest Neighbor Search Library))。网上有源代码例程如下:
~~~
#include <stdio.h>
#include <iostream>
#include "opencv2/core/core.hpp"
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/legacy/legacy.hpp>
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
void readme();
/** @function main */
int main( int argc, char** argv )
{
if( argc != 3 )
{ readme(); return -1; }
Mat img_1 = imread( argv[1], CV_LOAD_IMAGE_GRAYSCALE );
Mat img_2 = imread( argv[2], CV_LOAD_IMAGE_GRAYSCALE );
if( !img_1.data || !img_2.data )
{ std::cout<< " --(!) Error reading images " << std::endl; return -1; }
//-- Step 1: Detect the keypoints using SURF Detector
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keypoints_1, keypoints_2;
detector.detect( img_1, keypoints_1 );
detector.detect( img_2, keypoints_2 );
//-- Step 2: Calculate descriptors (feature vectors)
SurfDescriptorExtractor extractor;
Mat descriptors_1, descriptors_2;
extractor.compute( img_1, keypoints_1, descriptors_1 );
extractor.compute( img_2, keypoints_2, descriptors_2 );
//-- Step 3: Matching descriptor vectors using FLANN matcher
FlannBasedMatcher matcher;
std::vector< DMatch > matches;
matcher.match( descriptors_1, descriptors_2, matches );
double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{ double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 2*min_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{ if( matches[i].distance < 2*min_dist )
{ good_matches.push_back( matches[i]); }
}
//-- Draw only "good" matches
Mat img_matches;
drawMatches( img_1, keypoints_1, img_2, keypoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Show detected matches
imshow( "Good Matches", img_matches );
for( int i = 0; i < good_matches.size(); i++ )
{ printf( "-- Good Match [%d] Keypoint 1: %d -- Keypoint 2: %d \n", i, good_matches[i].queryIdx, good_matches[i].trainIdx ); }
waitKey(0);
return 0;
}
/** @function readme */
void readme()
{ std::cout << " Usage: ./SURF_FlannMatcher <img1> <img2>" << std::endl; }
~~~
以上只是记录这种方法的实现例程,并没有验证代码的正确性。
参考资料:
[http://blog.sina.com.cn/s/blog_a98e39a201017pgn.html](http://blog.sina.com.cn/s/blog_a98e39a201017pgn.html)
[http://www.cnblogs.com/tornadomeet/archive/2012/08/17/2644903.html](http://www.cnblogs.com/tornadomeet/archive/2012/08/17/2644903.html) (SURF算法的理论介绍)
[http://blog.csdn.net/liyuefeilong/article/details/44166069](http://blog.csdn.net/liyuefeilong/article/details/44166069)
[http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/feature_flann_matcher/feature_flann_matcher.html](http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/features2d/feature_flann_matcher/feature_flann_matcher.html)