PgSQL · 实战经验 · 旋转门压缩算法在PostgreSQL中的实现
最后更新于:2022-04-01 10:34:00
## 背景
在物联网、监控、传感器、金融等应用领域,数据在时间维度上流式的产生,而且数据量非常庞大。
例如我们经常看到的性能监控视图,就是很多点在时间维度上描绘的曲线。
又比如金融行业的走势数据等等。
我们想象一下,如果每个传感器或指标每100毫秒产生1个点,一天就是864000个点。
而传感器或指标是非常多的,例如有100万个传感器或指标,一天的量就接近一亿的量。
假设我们要描绘一个时间段的图形,这么多的点,渲染估计都要很久。
那么有没有好的压缩算法,即能保证失真度,又能很好的对数据进行压缩呢?
## 旋转门压缩算法原理
旋转门压缩算法(SDT)是一种直线趋势化压缩算法,其本质是通过一条由起点和终点确定的直线代替一系列连续数据点。
该算法需要记录每段时间间隔长度、起点数据和终点数据, 前一段的终点数据即为下一段的起点数据。
其基本原理较为简单, 参见图。
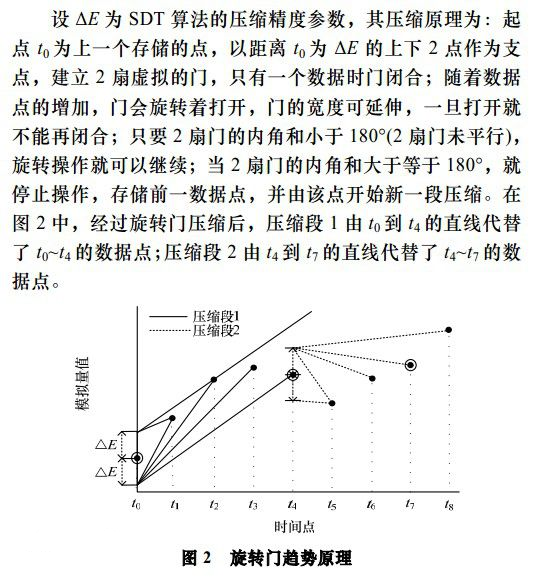
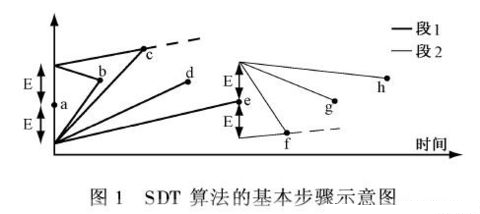
第一个数据点a上下各有一点,它们与a点之间的距离为E(即门的宽度), 这两个点作为“门”的两个支点。
当只有第一个数据点时,两扇门都是关闭的;随着点数越来越多,门将逐步打开;注意到每扇门的宽度是可以伸缩的,在一段时间间隔里面,门一旦打开就不能闭;
只要两扇门未达到平行,或者说两个内角之和小于180°(本文的算法将利用这一点进行判断),这种“转门”操作即可继续进行。
图中第一个时间段是从a到e, 结果是用a点到e点之间的直线代替数据点(a,b,c,d,e); 起到了可控失真(E)的压缩作用。
第二个时间间隔从e点开始,开始时两扇门关闭,然后逐步打开,后续操作与前一段类似。
## 在PostgreSQL中实现旋转门压缩算法
通过旋转门算法的原理,可以了解到,有几个必要的输入项。
* 有x坐标和y坐标的点(如果是时间轴上的点,可以通过epoch转换成这种形式)
* E,即门的宽度,起到了控制压缩失真度的作用
### 例子
#### 创建测试表
~~~
create table tbl(id int, -- ID,可有可无
val numeric, -- 值(如传感器或金融行业的点值)
t timestamp -- 取值时间戳
);
~~~
#### 插入10万条测试数据
~~~
insert into tbl select generate_series(1,100000), round((random()*100)::numeric, 2), clock_timestamp()+(generate_series(1,100000) || ' second')::interval ;
test=> select * from tbl limit 10;
id | val | t
----+-------+----------------------------
1 | 31.79 | 2016-08-12 23:22:27.530318
2 | 18.23 | 2016-08-12 23:22:28.530443
3 | 5.14 | 2016-08-12 23:22:29.530453
4 | 90.25 | 2016-08-12 23:22:30.530459
5 | 8.17 | 2016-08-12 23:22:31.530465
6 | 97.43 | 2016-08-12 23:22:32.53047
7 | 17.41 | 2016-08-12 23:22:33.530476
8 | 0.23 | 2016-08-12 23:22:34.530481
9 | 84.67 | 2016-08-12 23:22:35.530487
10 | 16.37 | 2016-08-12 23:22:36.530493
(10 rows)
~~~
#### 时间如何转换成X轴的数值,假设每1秒为X坐标的1个单位
~~~
test=> select (extract(epoch from t)-extract(epoch from first_value(t) over())) / 1 as x, -- 除以1秒为1个单位
val, t from tbl limit 100;
x | val | t
------------------+-------+----------------------------
0 | 31.79 | 2016-08-12 23:22:27.530318
1.00012493133545 | 18.23 | 2016-08-12 23:22:28.530443
2.00013494491577 | 5.14 | 2016-08-12 23:22:29.530453
3.00014090538025 | 90.25 | 2016-08-12 23:22:30.530459
4.00014686584473 | 8.17 | 2016-08-12 23:22:31.530465
5.00015187263489 | 97.43 | 2016-08-12 23:22:32.53047
6.00015807151794 | 17.41 | 2016-08-12 23:22:33.530476
7.00016307830811 | 0.23 | 2016-08-12 23:22:34.530481
8.00016903877258 | 84.67 | 2016-08-12 23:22:35.530487
~~~
#### 编写实现螺旋门算法的函数
~~~
create or replace function f (
i_radius numeric, -- 压缩半径
i_time timestamp, -- 开始时间
i_interval_s numeric, -- 时间转换间隔 (秒,例如每5秒在坐标上表示1个单位间隔,则这里使用5)
OUT o_val numeric, -- 值,纵坐标 y (跳跃点y)
OUT o_time timestamp, -- 时间,横坐标 x (跳跃点x)
OUT o_x numeric -- 跳跃点x, 通过 o_time 转换
)
returns setof record as $$
declare
v_time timestamp; -- 时间变量
v_x numeric; -- v_time 转换为v_x
v_val numeric; -- y坐标
v1_time timestamp; -- 前一点 时间变量
v1_x numeric; -- 前一点 v_time 转换为v_x
v1_val numeric; -- 前一点 y坐标
v_start_time numeric; -- 记录第一条的时间坐标, 用于计算x偏移量
v_rownum int8; -- 用于标记是否第一行
v_max_angle1 numeric; -- 最大上门夹角角度
v_max_angle2 numeric; -- 最大下门夹角角度
v_angle1 numeric; -- 上门夹角角度
v_angle2 numeric; -- 下门夹角角度
begin
for v_rownum, v_time , v_val in select row_number() over(), t, val from tbl where t>i_time order by t limit 100 -- 这条QUERY可以做成execute的动态QUERY,本文略
LOOP
-- 第一行,第一个点,是实际要记录的点位
if v_rownum=1 then
v_start_time := extract(epoch from v_time);
v_x := 0;
o_val := v_val;
o_time := v_time;
o_x := v_x;
-- raise notice 'rownum=1 %, %', o_val,o_time;
return next; -- 返回第一个点
else
v_x := (extract(epoch from v_time) - v_start_time) / i_interval_s; -- 生成X坐标
SELECT 180-ST_Azimuth(
ST_MakePoint(o_x, o_val+i_radius), -- 门上点
ST_MakePoint(v_x, v_val) -- next point
)/(2*pi())*360 as degAz, -- 上夹角
ST_Azimuth(
ST_MakePoint(o_x, o_val-i_radius), -- 门下点
ST_MakePoint(v_x, v_val) -- next point
)/(2*pi())*360 As degAzrev -- 下夹角
INTO v_angle1, v_angle2;
select GREATEST(v_angle1, v_max_angle1), GREATEST(v_angle2, v_max_angle2) into v_max_angle1, v_max_angle2;
if (v_max_angle1 + v_max_angle2) >= 180 then -- 找到四边形外的点位,输出上一个点,并从上一个点开始重新计算四边形
-- raise notice 'max1 %, max2 %', v_max_angle1 , v_max_angle2;
-- 复原
v_angle1 := 0;
v_max_angle1 := 0;
v_angle2 := 0;
v_max_angle2 := 0;
-- 门已完全打开,输出前一个点的值
o_val := v1_val;
o_time := v1_time;
v1_x := (extract(epoch from v1_time) - v_start_time) / i_interval_s; -- 生成前一个点的X坐标
o_x := v1_x;
-- 用新的门,与当前点计算新的夹角
SELECT 180-ST_Azimuth(
ST_MakePoint(o_x, o_val+i_radius), -- 门上点
ST_MakePoint(v_x, v_val) -- next point
)/(2*pi())*360 as degAz, -- 上夹角
ST_Azimuth(
ST_MakePoint(o_x, o_val-i_radius), -- 门下点
ST_MakePoint(v_x, v_val) -- next point
)/(2*pi())*360 As degAzrev -- 下夹角
INTO v_angle1, v_angle2;
select GREATEST(v_angle1, v_max_angle1), GREATEST(v_angle2, v_max_angle2) into v_max_angle1, v_max_angle2;
-- raise notice 'new max %, new max %', v_max_angle1 , v_max_angle2;
-- raise notice 'rownum<>1 %, %', o_val, o_time;
return next;
end if;
-- 记录当前值,保存作为下一个点的前点
v1_val := v_val;
v1_time := v_time;
end if;
END LOOP;
end;
$$ language plpgsql strict;
~~~
#### 压缩测试
门宽为15,起始时间为’2016-08-12 23:22:27.530318’,每1秒表示1个X坐标单位。
~~~
test=> select * from f(15,'2016-08-12 23:22:27.530318',1);
o_val | o_time | o_x
-------+----------------------------+------------------
18.23 | 2016-08-12 23:22:28.530443 | 0
5.14 | 2016-08-12 23:22:29.530453 | 1.00001287460327
90.25 | 2016-08-12 23:22:30.530459 | 2.00001883506775
......
87.90 | 2016-08-12 23:24:01.53098 | 93.0005400180817
29.94 | 2016-08-12 23:24:02.530985 | 94.0005450248718
63.53 | 2016-08-12 23:24:03.53099 | 95.0005497932434
12.25 | 2016-08-12 23:24:04.530996 | 96.0005559921265
83.21 | 2016-08-12 23:24:05.531001 | 97.0005609989166
(71 rows)
~~~
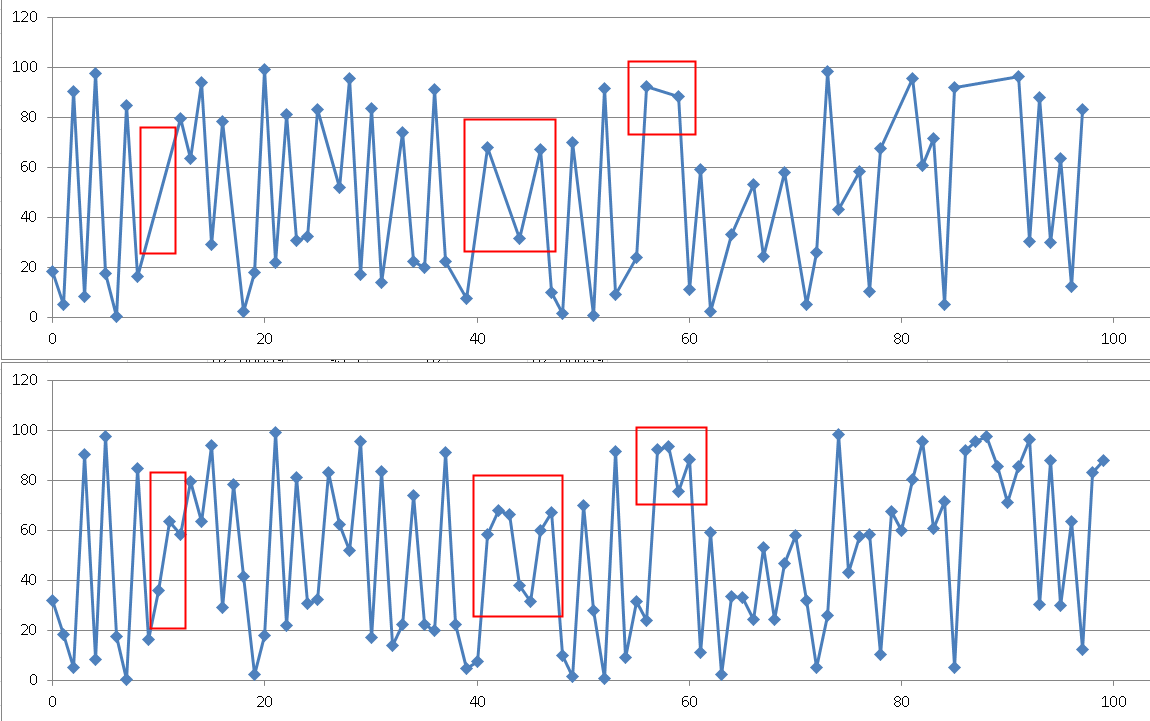
可以看到100个点,压缩成了71个点。
#### 对比一下原来的100个点的值
~~~
test=> select val, t, (extract(epoch from t)-extract(epoch from first_value(t) over()))/1 as x from tbl where t>'2016-08-12 23:22:27.530318' order by t limit 100;
val | t | x
-------+----------------------------+------------------
18.23 | 2016-08-12 23:22:28.530443 | 0
5.14 | 2016-08-12 23:22:29.530453 | 1.00001001358032
90.25 | 2016-08-12 23:22:30.530459 | 2.0000159740448
......
83.21 | 2016-08-12 23:24:05.531001 | 97.0005581378937
87.97 | 2016-08-12 23:24:06.531006 | 98.0005631446838
58.97 | 2016-08-12 23:24:07.531012 | 99.0005691051483
(100 rows)
~~~
使用excel绘图,进行压缩前后的对比
上面是压缩后的数据绘图,下面是压缩前的数据绘图
红色标记的位置,就是通过旋转门算法压缩掉的数据。
失真度是可控的。
## 流式压缩的实现
本文略,其实也很简单,这个函数改一下,创建一个以数组为输入参数的函数。
以lambda的方式,实时的从流式输入的管道取数,并执行即可。
也可以写成聚合函数,在基于PostgreSQL 的流式数据库pipelineDB中调用,实现流式计算。
## 小结
通过旋转门算法,对IT监控、金融、电力、水利等监控、物联网、等流式数据进行实时的压缩。
数据不需要从数据库LOAD出来即可在库内完成运算和压缩。
用户也可以根据实际的需求,进行流式的数据压缩,同样数据也不需要从数据库LOAD出来,在数据库端即可完成。
PostgreSQL的功能一如既往的强大,好用,快用起来吧。
## 参考
1. http://baike.baidu.com/view/3478397.htm
2. http://postgis.net/docs/manual-2.2/ST_Azimuth.html
3. https://www.postgresql.org/docs/devel/static/functions-conditional.html
4. http://gis.stackexchange.com/questions/25126/how-to-calculate-the-angle-at-which-two-lines-intersect-in-postgis
5. http://gis.stackexchange.com/questions/668/how-can-i-calculate-the-bearing-between-two-points-in-postgis
6. http://www.pipelinedb.com/